دوست عزیز شما به صورت رایگان می توانید از این محتوا استفاده کنید.
برای مشاهده محتوای ویدئویی آموزش کافیست بر روی گزینه زیر کلیک کنید.
مشاهده محتواقسمت درسنامه را بصورت رایگان مشاهده کنید.
برای مشاهده محتواهای مشابه و تکمیل آموزش خود می توانید به قسمت محتواهای پیشنهادی مراجعه کنید.
درباره مدرس

مهندس یاسمین خضری
ایشان کارشناس ارشد مهندسی برق-کنترل از دانشکده مهندسی دانشگاه شیراز می باشند. زمینه تخصصی ایشان فعالیت در حوزه ی طراحی و ساخت دستگاه های اندازه گیری (ابزار دقیق) می باشد. مهندس خضری در حوزه تخصصی خود توانسته اند پروژه های متعددی را در دانشگاه و صنعت راه اندازی و اجرا نمایند.

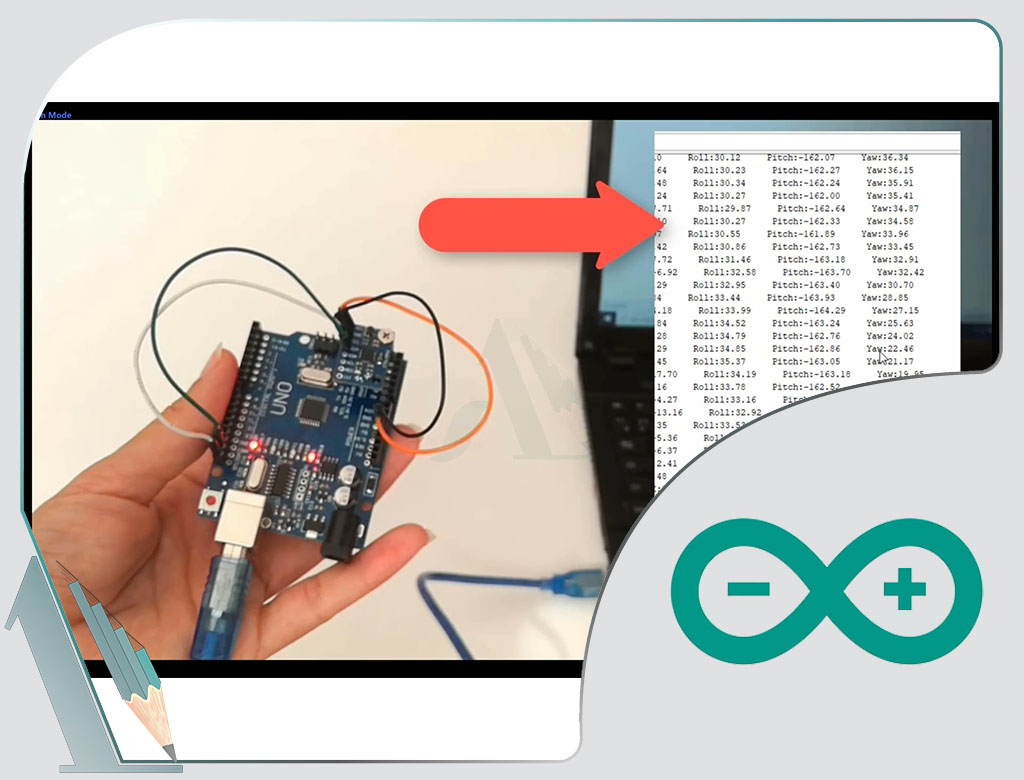
عنوان کلیپ تخصصی: خطایابی و فیلتر داده های ماژول MPU 6050 و استخراج پارامترهای Roll ، Pitch و Yaw در نرم افزار Arduino (سخت افزار) چکیده کلیپ تخصصی: ماژول MPU6050 یک ماژول با حداقل 6 درجه آزادی، سه داده ی شتاب سنج و سه داده ی ژیروسکوپ است که به علت حساسیت وضعیت سنسورهای ماژول نسبت به سطح زمین، اثرات الکترومغناطیسی و ... داده های خروجی آن اغلب با خطا و نویز همراه هستند که باید به چند روش خطاهای ثابت و متغیر آن برطرف شود. در این پروژه یک ماژول MPU6050 را به صورت سخت افزاری راه اندازی کرده و شش داده ی خروجی شتاب سنج و ژیروسکوپرا دریافت و خطایابی کرده و همچنین متغیرهای Roll ، Pitch و Yaw محاسبه و در سریال مانیتور نمایش می دهیم. آنچه برای این آموزش لازم دارید: • برد Arduino • ماژول MPU6050 • کابل پروگرمر مناسب برد Arduino استفاده شده • اسپیسر، پیچ و مهره ی سایز 3 • سیم فهرست روند اجرا شده در کلیپ: • معرفی پروژه • معرفی قطعات • انجام اتصالات و سیم کشی مدار پروژه • اتصال برد Arduino به لپ تاپ با کابل پروگرمر • انتخاب صحیح برد و پورت سریال و آپلود کد بر روی برد • خواندن داده ی های شتاب سنج، ژیروسکوپ و متغیرهای Roll ، Pitch و Yaw در محیط سریال مانیتور • تغییر وضعیت حرکتی و مشاهده ی تغییرات داده ها کلید واژگان: MPU6050 – سنسور- شتاب سنج-ژیروسکوپ-دماسنج –آردوینو- برد آردوینو -sensor-Arduino-IMU- Arduino board- MPU6050 wiring- MPU6050 connection- Roll-Pitch-Yaw
بعد از پرداخت موفقیت امیز به صورت آنی شما می توانید از طریق وبسایت به ویدئوهای دوره دسترسی داشته باشید.
کافیست از طریق پشتیبانی آنلاین ما را مطلع نمائید در سریع ترین زمان شما را راهنمائی خواهیم کرد.
برچسب ها
#MPU6050 – سنسور # شتاب سنج #ژیروسکوپ #دماسنج –آردوینو # برد آردوینو #sensor #Arduino #IMU # Arduino board # MPU6050 wiring # MPU6050 connection # Roll #Pitch #Yaw